

Der K-BUS-Emulator: Brücke zwischen E36-Verkabelung und E46-Instrumentencluster
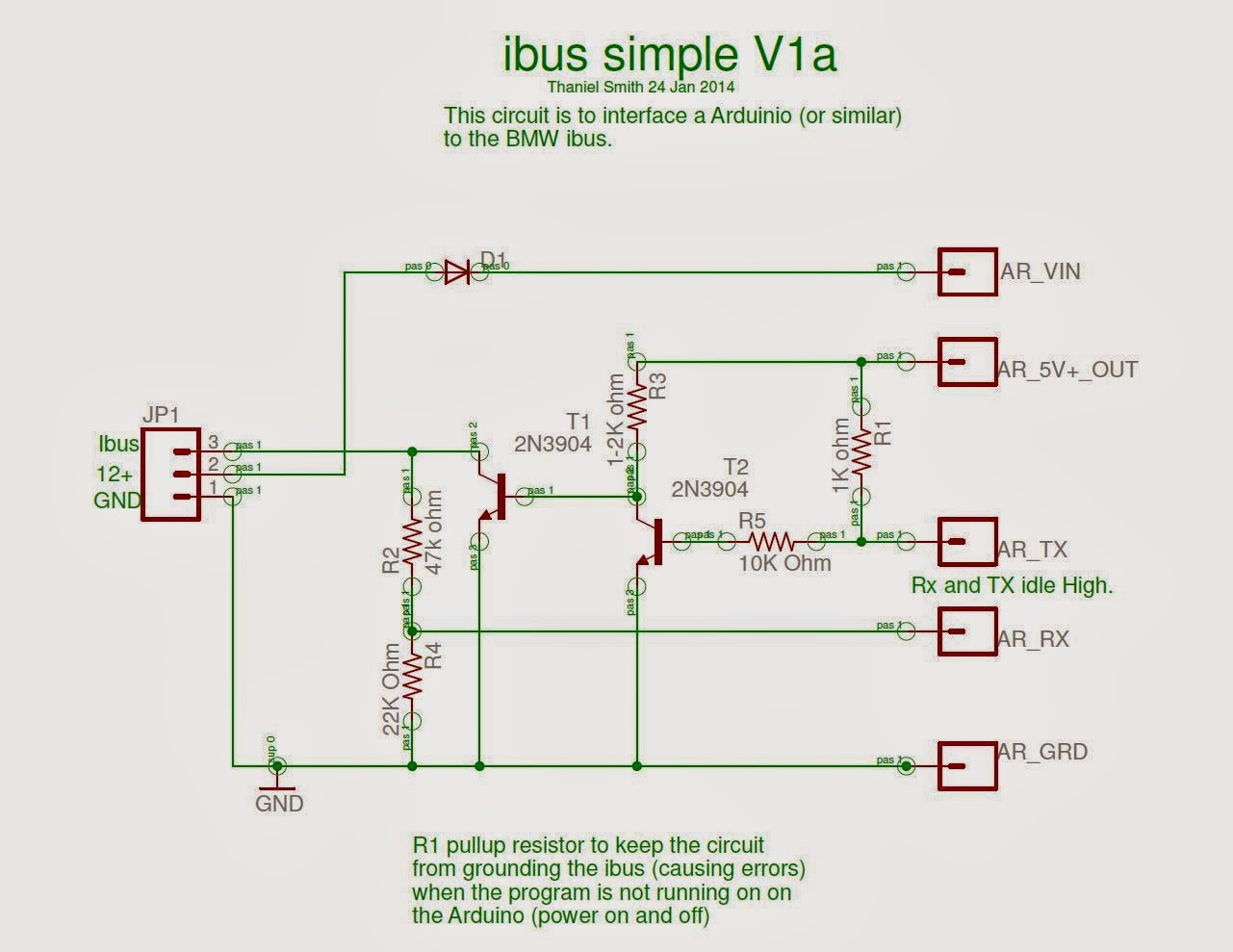
Der K-BUS Emulator ist ein maßgeschneidertes Modul, das die Lücke zwischen der originalen E36-Verkabelung und dem E46-Instrumentencluster schließt. Es übersetzt die Signale, damit alle Funktionen wie vorgesehen arbeiten.
Die Schaltung basiert auf den Schaltplänen von e46canbus.blogspot.com. Allerdings war für die Anpassung an die 12V-Eingänge des Fahrzeugs eine zusätzliche Spannungsteiler-Schaltung für jeden Eingang erforderlich.
Nach sorgfältigen Berechnungen stellte ich fest, dass maximal sechs Eingänge benötigt werden, damit der Tacho ordnungsgemäß funktioniert. Diese steuern hauptsächlich die Außenbeleuchtung, während Anzeigen für geöffnete Türen und defekte Glühlampen vom Besitzer als nicht erforderlich angesehen wurden.
Unten ist mein Arduino-Code, der Snippets aus tsharp42/E46ClusterDriver enthält.
byte value = 0x00;
byte lastvalue = 0xFF;
bool sendMessage = false;
const unsigned long eventInterval = 1000;
unsigned long previousTime = 0;
const unsigned long indexSampler = 400;
unsigned long leftIndex = 0;
unsigned long rightIndex = 0;
unsigned long bothIndex = 0;
bool leftIndexSet = false;
bool rightIndexSet = false;
bool bothIndexSet = false;
/* L.TURN INDICATOR 7, R.TURN INDICATOR 8, HAZARD 9, HIGHBEAM 10, FRONTFOG 11, REARFOG 12 */
const int Pins[6] = {7, 8, 9, 10, 11, 12};
const int Values[6] = {0x20, 0x40, 0x60, 0x05, 0x08, 0x10};
void setup() {
Serial.begin(9600, SERIAL_8E1);
for (int i=0; i < 6; i++) {
pinMode(Pins[i], INPUT);
}
}
void loop() {
unsigned long currentTime = millis();
value = 0x00;
for (int i=0; i < 6; i++) {
if (digitalRead(Pins[i]) == HIGH) {
if(i == 0) { leftIndex = millis(); leftIndexSet = true; }
if(i == 1) { rightIndex = millis(); rightIndexSet = true; }
//if(i == 2) { bothIndex = millis(); bothIndexSet = true; }
value+=Values[i];
sendMessage = true;
} else {
if(i == 0) { leftIndexSet = false; }
if(i == 1) { rightIndexSet = false; }
//if(i == 2) { bothIndexSet = false; }
continue;
}
}
if (currentTime - leftIndex <= indexSampler && leftIndexSet == false) { value += Values[0]; }
if (currentTime - rightIndex <= indexSampler && rightIndexSet == false) { value += Values[1]; }
//if (currentTime - bothIndex <= indexSampler && bothIndexSet == false) { value += Values[2]; }
if(sendMessage == true && value != lastvalue) {
sendMessage = false;
lastvalue = value;
// TURN INDICATOR FIX
if(value >= 0xA0) { value = value-0x40; }
if(value >= 0x80) { value = value-0x20; }
byte message[] = {0xD0, 0x08, 0xBF, 0x5B, value, 0x00, 0x00, 0x00, 0x00, 0x58, 0x00};
sendKbus(message);
}
if (currentTime - previousTime >= eventInterval) {
previousTime = currentTime;
lastvalue = 0xFF;
sendMessage = true;
}
}
void sendKbus(byte *data) {
int end_i = data[1]+2 ;
data[end_i-1] = iso_checksum(data, end_i-1);
Serial.write(data, end_i+1);
}
byte iso_checksum(byte *data, byte len) {
byte crc=0;
for(byte i=0; i < len; i++) {
crc=crc^data[i];
}
return crc;
}Video-Demonstration:
Project Info
Category:
BMW, Programming, Projects