

K-BUS Emulator: Bridging the E36 Wiring to an E46 Cluster
Sep 05, 2022
The K-BUS emulator is a custom module designed to bridge the gap between the E36’s original wiring and the E46 instrument cluster, translating signals to ensure everything functions as expected.
The circuit is based on schematics from e46canbus.blogspot.com. However, to accommodate the 12V inputs from the car, an additional voltage divider circuit was required for each input.
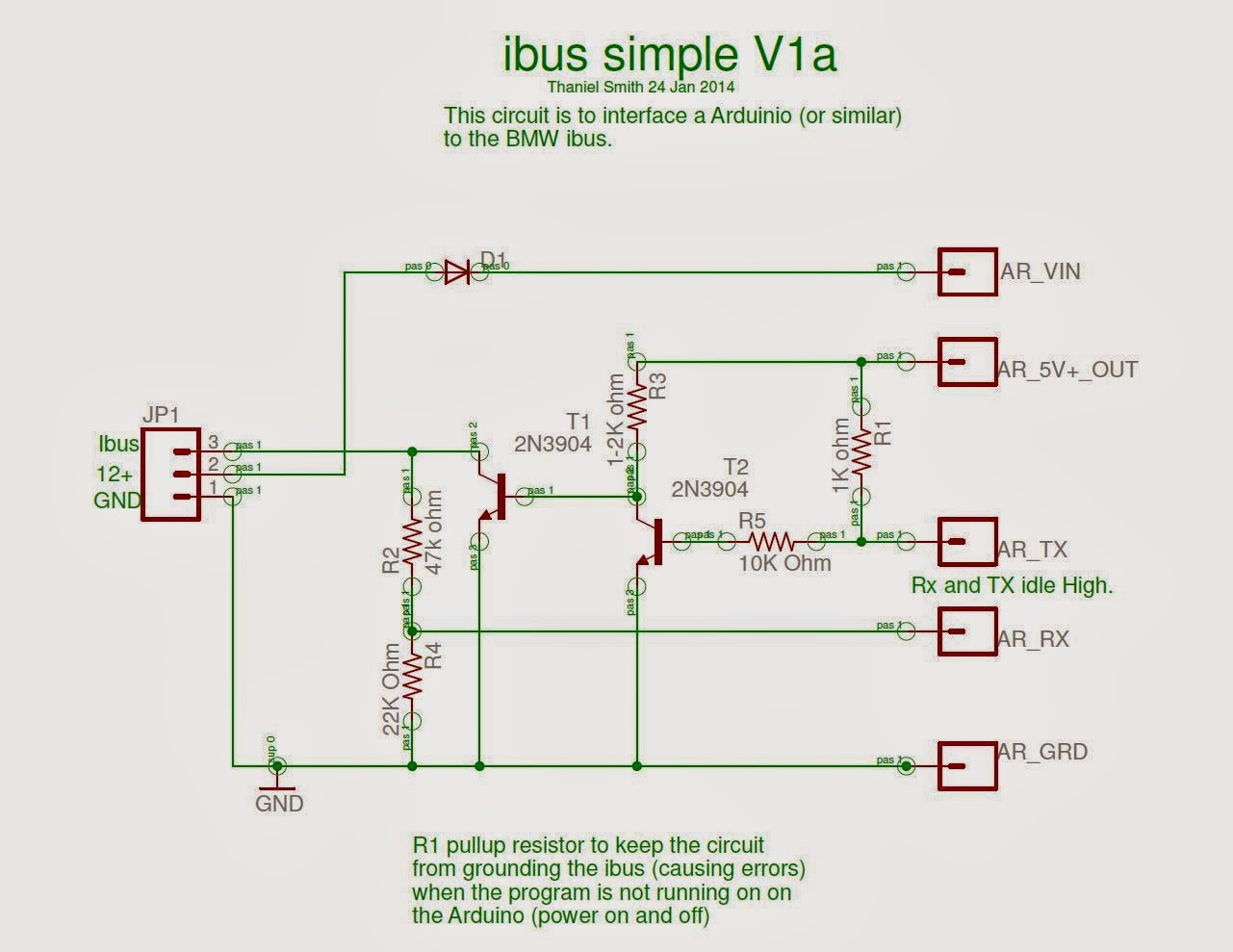
After some calculations, I determined that a maximum of six inputs was necessary for the cluster to function properly. These primarily handle the exterior lights, while indicators for open doors and bulb-out warnings were deemed unnecessary by the owner.
Below is my Arduino code, which includes snippets from tsharp42/E46ClusterDriver.
byte value = 0x00;
byte lastvalue = 0xFF;
bool sendMessage = false;
const unsigned long eventInterval = 1000;
unsigned long previousTime = 0;
const unsigned long indexSampler = 400;
unsigned long leftIndex = 0;
unsigned long rightIndex = 0;
unsigned long bothIndex = 0;
bool leftIndexSet = false;
bool rightIndexSet = false;
bool bothIndexSet = false;
/* L.TURN INDICATOR 7, R.TURN INDICATOR 8, HAZARD 9, HIGHBEAM 10, FRONTFOG 11, REARFOG 12 */
const int Pins[6] = {7, 8, 9, 10, 11, 12};
const int Values[6] = {0x20, 0x40, 0x60, 0x05, 0x08, 0x10};
void setup() {
Serial.begin(9600, SERIAL_8E1);
for (int i=0; i < 6; i++) {
pinMode(Pins[i], INPUT);
}
}
void loop() {
unsigned long currentTime = millis();
value = 0x00;
for (int i=0; i < 6; i++) {
if (digitalRead(Pins[i]) == HIGH) {
if(i == 0) { leftIndex = millis(); leftIndexSet = true; }
if(i == 1) { rightIndex = millis(); rightIndexSet = true; }
//if(i == 2) { bothIndex = millis(); bothIndexSet = true; }
value+=Values[i];
sendMessage = true;
} else {
if(i == 0) { leftIndexSet = false; }
if(i == 1) { rightIndexSet = false; }
//if(i == 2) { bothIndexSet = false; }
continue;
}
}
if (currentTime - leftIndex <= indexSampler && leftIndexSet == false) { value += Values[0]; }
if (currentTime - rightIndex <= indexSampler && rightIndexSet == false) { value += Values[1]; }
//if (currentTime - bothIndex <= indexSampler && bothIndexSet == false) { value += Values[2]; }
if(sendMessage == true && value != lastvalue) {
sendMessage = false;
lastvalue = value;
// TURN INDICATOR FIX
if(value >= 0xA0) { value = value-0x40; }
if(value >= 0x80) { value = value-0x20; }
byte message[] = {0xD0, 0x08, 0xBF, 0x5B, value, 0x00, 0x00, 0x00, 0x00, 0x58, 0x00};
sendKbus(message);
}
if (currentTime - previousTime >= eventInterval) {
previousTime = currentTime;
lastvalue = 0xFF;
sendMessage = true;
}
}
void sendKbus(byte *data) {
int end_i = data[1]+2 ;
data[end_i-1] = iso_checksum(data, end_i-1);
Serial.write(data, end_i+1);
}
byte iso_checksum(byte *data, byte len) {
byte crc=0;
for(byte i=0; i < len; i++) {
crc=crc^data[i];
}
return crc;
}Video demonstration: